Download Windows Media Player
Download Windows Media Player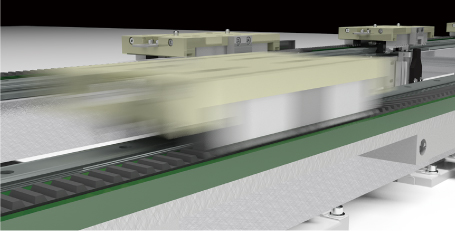
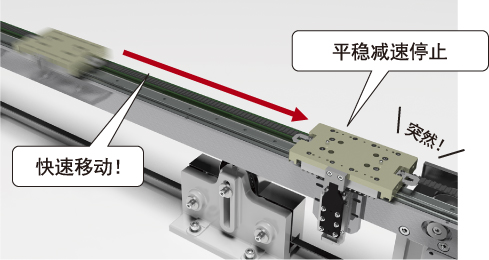
通过伺服电机控制的驱动,可实现平稳的加速移动•减速停止。此外,在载体中没有冲击的状态下的工件搬送、工件不会飞起,能够实现平稳地搬送。此外,由于较高的刚性,即使快速也可以无振动搬送。

驱动中采用伺服电机

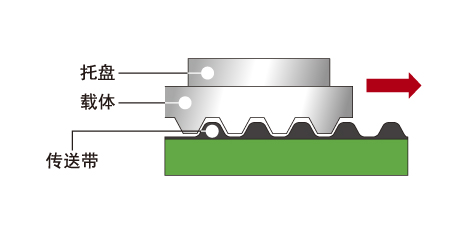
使直线导轨上的载体通过
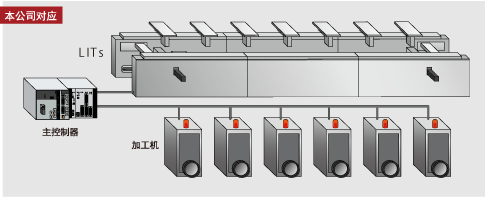
传送带驱动搬送[专利申请中]













※视听时需要Windows Media Player。如果您使用的电脑没有安装的话,
请从右标题下载Windows Media Player(免费),安装之后视听。

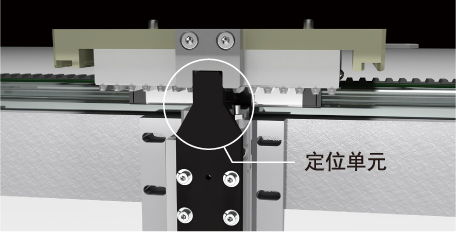
根据定位单元提高定位精度。因此可实现搬送中的精密加工。即使在快速行驶中也能够以稳定的姿势移动,载体的定位为机械地执行,因此不能像直线电机一样简单地移动。
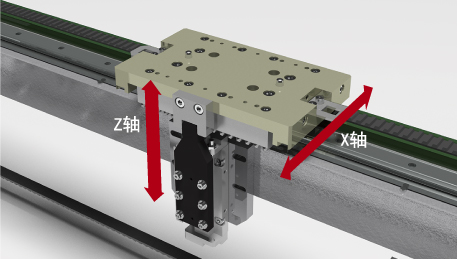
通过使用直线导轨进行
载体的XZ轴方向定位
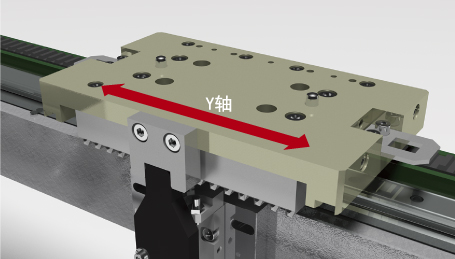
通过定位单元进行载体的
Y轴方向定位

通过伺服电机控制的驱动,可实现平稳的加速移动•减速停止。此外,在载体中没有冲击的状态下的工件搬送、工件不会飞起,能够实现平稳地搬送。此外,由于较高的刚性,即使快速也可以无振动搬送。
驱动中采用伺服电机
使直线导轨上的载体通过
传送带驱动搬送[专利申请中]

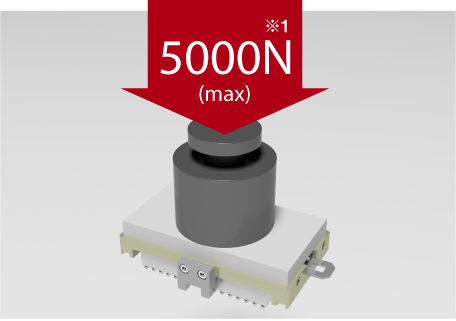
※1若要获取重负荷,需要另外购买单体支架。

可进行需要最大5000N(垂直)以内负荷的加工。
重负荷用:LA8 轻负荷用:LA5
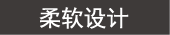
间隔的变化也很丰富。此外,也有可能是搬送间隔变更、连接线路、纵型线路,灵活对应各种需求。
搬送间隔变更※2[专利申请中]
连接线路※3

纵型线路※2
※2对应特制生产设备 ※3对应初期设备投资阶段(未对应增设)


围绕顾客的课题,听取需求。
(意见听取会内容)工件形状、大小、重量、加工工序(最大负荷重量等)、所需生产数量相对应的所需轴数、生产环境等。
根据需要进行要素实验•试制。根据意见听取会内容设计构想。
在此阶段决定FA基础。为了实现向实际形状的具体化进行具体设计。
根据各阶段实施DR(设计评审)。
运用国内外网络尽力实现迅速的材料采购。
包含搬送部设备的架台•单元部通过本公司加工中心,
进行制罐加工、铸件一体加工。
由专业熟练的职员认真且迅速完成组装。
结合系统构造所需要的框架计划与元素法制作运动程序,
并构造为了操作精密部件构造最适合的机械动作。
在公司内部进行程序设计调整、运行测试,并进行品质确认。
随后,根据顾客听证进行最终确认。
在顾客工厂进行安装•运转确认并进行交货。
我们希望您可以长期使用包括消耗品在内良好的设备,
通常进行与顾客成为一体的生产体制的追踪。

| 规格 | LA8类型 | LA5类型 |
|---|---|---|
|
承重量 (每个载体) |
垂直方向 安装支持单元时
5000N(载体中心部的承重量) |
垂直方向 安装支持单元时
5000N(载体中心部的承重量) |
|
水平方向 安装支持单元时
100N・m |
水平方向 安装支持单元时
50N・m |
|
| 最大装载重量(每个载体) | 15kg以内(含有标准载体重量) | 6kg以内(含有标准载体重量) |
| 保证期间 | 1年/连续运行时为2000小时 | |
| 使用环境 |
|
|